Universal CANbus solution remotely monitors vehicles and heavy machinery of all types
In today’s world, a Controller Area Network (CAN) is used in diverse industrial machinery which may consist of multiple microcontroller modules that need to communicate to each other for safe, efficient and uninterrupted operation and provide an extended functionality. Be it a refrigerating trailer unit or paver, a bus or a drilling rig, a truck or a combine-harvester, they all utilize a very sophisticated communication mechanism with multi-drop capabilities for their modules to interact to each-other.
Initially, CAN was developed for the automotive industry as an in-vehicle network and over the years was adopted by many other industries. Nowadays, CAN is actively used in various types of transportation systems (e.g. railway locomotive and maintenance equipment, maritime, aviation), in building automation (e.g. HVAC), mobile machinery (forestry, agriculture, construction and mining machinery) as well as many other embedded electronic systems.
All newer cars have multiple Electronic Control Units (ECU) that manage, for example, the following modules and systems:
- Engine – engine control unit
- Alarm and security
- Antilock braking system (ABS), airbrakes control system
- Transmission
- Audio and entertainment system
- Fuel system
- Battery and recharging system
- Speed and cruise control
- etc.

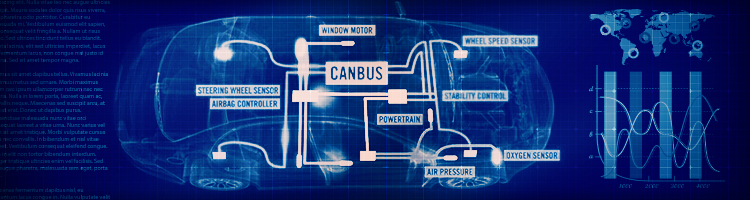
Figure 1. CANbus of a vehicle
All these systems and subsystems perform a giant number of operations every second and require information about various parameters that these systems need to share between each other. Thus, communication is essential for coordinated, sequential and coherent operations. As an example, in 2003, Toyota introduced a new feature for Prius hybrid vehicle called “Automated parking”, which performed parallel parking of the vehicle without human intervention.
 Same as humans, robots must perform such operation safely and accurately, therefore, several factors have to be taken into account: nearby people/vehicles/other objects, enough space availability to park a vehicle, distance from the roadside, clear view of the surrounding area, including blind spots, vehicle speed during maneuver and many others. Since robots have no eyes and ears, they use multiple sensors as well as information from various modules to “observe” and control the environment them. This information is constantly delivered to the dedicated processing unit in a timely manner while the operation is being performed. A robot has to know when to turn the steering wheel, in what direction, when to accelerate or reduce the speed and when to stop completely. CANbus is the fundamental component throughout all systems and modules providing lossless communications means among all modules.
Same as humans, robots must perform such operation safely and accurately, therefore, several factors have to be taken into account: nearby people/vehicles/other objects, enough space availability to park a vehicle, distance from the roadside, clear view of the surrounding area, including blind spots, vehicle speed during maneuver and many others. Since robots have no eyes and ears, they use multiple sensors as well as information from various modules to “observe” and control the environment them. This information is constantly delivered to the dedicated processing unit in a timely manner while the operation is being performed. A robot has to know when to turn the steering wheel, in what direction, when to accelerate or reduce the speed and when to stop completely. CANbus is the fundamental component throughout all systems and modules providing lossless communications means among all modules.
CAN-bus in Fleet Management

It used to be that “a dot on the map“ was the only information that the fleet owner wanted to know regarding their assets. With the development of M2M as well as the advent the of IoT concept, the requirements towards the nature of information that may and must be transmitted have increased respectively. Not only do fleet owners have the ability to track their assets, they want and are able to control and coordinate them remotely. Most modern Fleet Management Solutions offer the following standard set of information that is available in real-time manner: fuel level and fuel consumption, engine health state, hours-of-service, driving behavior, odometer readings, axle load data, temperature, tire pressure etc. In most cases, all this information is available through CANbus. Therefore, obtaining these parameters directly from the bus is that most vehicle manufacturers use different communication standards / ECUs.
SAE J1708

J1708 is one protocols that is used on heavy duty trucks and buses for serial communication between modules and microprocessors, it defines a lower layer and allow other higher layer protocols such as J1587 to operate on top. Although J1708 is still being widely used today, it has been replaced by another standard – J1939 which is a CAN protocol. More information can be found here:http://www.sae.org/
SAE J1939

J1939 is a newer protocol widely used in most modern commercial vehicles, bases and other machinery for communication and diagnostics among various systems components. This protocol defines that despite the request packets, all data packets consist of a standard header which contains an index - Parameter Group Number (PGN) and which therefore is embedded in the identifier of a message as well as eight bytes of data. A PGN identifies a function of a message and data associated with it. Also, PGNs define the data which consist of a variable number of Suspect Parameter Number (SPN) elements defined for unique data. Nowadays, J1939 attempts to standardize PGNs thorough various industries as automotive, off-road vehicle, agricultural, maritime and to reserve a range of PGNs (00FF0016 through 00FFFF16, inclusive) for proprietary use. For example, there is a defined SPN for engine RPM, however, not all engine manufacturers use this standard SPN for engine RPM. Click here for more information: http://www.sae.org/
SAE J1979

J1979 or On-board diagnostics (OBD) is the standard that provides access to the status of the various vehicle systems and subsystems. The number of diagnostic parameters available over OBD varies due to diversity of on-board computers used by different vehicle manufacturers. Modern implementations of OBD, which is OBDII use a standardized communications interface and provide data in real-time manner along with the standardized diagnostic trouble codes (DTC). Today OBD is available in all modern light/medium duty trucks and since 2010 in heavy duty vehicles. As mentioned above, all these vehicles are required to support OBD diagnostics, via a standard connector. On-board diagnostics parameter IDs (PIDs) are codes that are used to request data from a vehicle. Similar to J1939, the J1979/OBDII also attempts to standardize PIDs, but manufacturers keep defining proprietary PIDs specific to their vehicles and even series of vehicle models. However, basic parameters such as “Engine RPM”, “Engine coolant temperature” or “Throttle position” are usually available across all vehicle, regardless of the manufactories. Click here for more information - http://standards.sae.org/j1979_201202/
Based on the above information it can be concluded that information retrieval from vehicles’ CANbus is non-trivial. It is necessary to know what communication standard is used in a given vehicle, whether is it J1708 or J1939; what parameters manufactures make available based on the specifications of the standard as well as what proprietary PGNs and SPNs (if referring to J1939 or J1979) defined by the manufacturer. In most cases, vehicles’ manufacturers do not release information on proprietary PGNs and SPNs, therefore it becomes almost impossible for the most solution providers to offer such a product that would be compatible with all vehicles that the fleet owners may have, be it a heavy-duty truck, a delivery van, a bus or a passenger car.
As an engineering firm, Global Satellite Engineering, Inc. (GSE) provides innovative engineering solutions for various industries. We design and create a wide range of products and services that range from hardware solutions to software solutions such as tracking solutions. Each of our products and services are designed to solve an opportunity in the marketplace and we pride ourselves in developing creative and innovative ways to solve problems. For Fleet Management, in particular, we have developed a solution that allows for a single hardware setup across a diverse fleet of vehicles our customers may have. A Universal CANbus controller is compatible for installation on all vehicles and provides full access to CANbus regardless of the manufactories of vehicles, models or purpose of use.

Figure 2. GSE’s Universal CANbus Solution for Vehicle Tracking
CANbus in Industrial Vehicles and Off-The-Road Machinery
Special industrial vehicles and off-the-road machinery such as, paving machines, bulldozers, skidders, backhoe loaders, feller bunchers, forestry harvesters and forwarders, harvester combines, pavement milling machines, graders, pipelayers, cranes, forklifts, articulated haulers, mobile power generators, hydromatic tools, railway vehicles and many other also use CANbus as a communication network between ECUs, modules and components.

Figure 3. GSE’s Universal CANbus Solution for Special Machinery Tracking and Remote Control
GSE’s Universal CANbus Solution is also fully compatible with most machinery used in Agriculture, Railway, Construction, Forestry, HVAC and other industries. Working on the same principle as for transportation vehicles, a Universal CANbus controller is also fully compatible for installation all vehicles and provides access to CANbus regardless of the manufacturer of a vehicle, model, or purpose of use. As long as a machinery or vehicle uses CANbus as a network, GSE’s hardware can be installed allowing full access to the CANbus information.
For example, for the agricultural harvester combines, on top of the standard CANbus dataset, our Universal CANbus controller provides the following additional information:
- Harvested area
- Performance
- Quantity of collected grain
- Grain humidity
- Harvesting time
- Etc.
How our “Universal CANbus Solution” works
The GSE “Universal CANbus Solution” consists of two hardware components: the Universal CANbus Controller and either the GSE GSatMicro Iridium Satellite Terminal or the IDP Series Terminals
Universal CANbus Controller

The Universal CANbus Controller is installed directly on a vehicle and connected to the CANbus wires either by soldering wires / applying crimps or using a contactless adaptor which reads through wire insulation. The advantage of our contactless readers is that they do not require prior identification of the CAN-High and CAN-Low wire, meaning the readers will automatically identify the wires and also are capable to perform signal strength self-adjust to either illuminate the noise or accelerate the signal coming from the bus. Once the controller is installed and configured to work with a given vehicle, it is connected to a terminal to send data retrieved from the CANbus.
GSatMicro

The GSatMicro is a powerful, small, customizable, self-contained Iridium tracker. It transmits wide data range through its industry-leading satellite antenna and electronics technology to be monitored and analyzed in real-time. Configuration capabilities enable the support of any asset and type of information, allowing the GSatMicro to be used in many different applications. The GSatMicro is a tracking solution that is extremely small yet very versatile. It is a fully scriptable device with eLua so any average user, or our own engineers, can rapidly design scripts to support any user application. Interconnecting the device with other hardware, user input interfaces, monitoring hardware, or environment data becomes very simple. Charging is supported over USB or regular DC voltage for versatility, includes a serial port for programming and control, SiRF V GPS with Galileo + GLONASS support, two inputs, two outputs, accelerometer, and digital compass.
Dual-Mode Satellite-Cellular IDP Terminal

Dual-Mode Satellite-Cellular terminals deliver connectivity to assets more effectively if the assets are travelling between remote locations with intermittent cellular coverage. When cellular networks are not available, data will be routed via Inmarsat’s IsatData Pro satellite network, and over GSM network inside cellular coverage, which allows reduced costs on the airtime. Since the IsatData Pro satellite network offers real-time service, is consistently available throughout the globe regardless of the local on-ground infrastructure presence, as well as being invulnerable to weather conditions, it makes it preferable as an alternate communication channel in those areas, where cellular networks are not available, including near polar regions.
By selecting our solution, fleet managers have the ability to continuously monitor and manage their personnel and assets regardless of location.
Table1. Short list of common parameters that our solution provides
| Name | Description |
| IgnitionON | Ignition status. |
| VehicleLockedRC | Indicates whether vehicle has been locked with remote control or not. |
| VehicleUnlockedRC | Indicates whether vehicle has been unlocked with remote control or not. |
| KeyFoundIgnitSwitch | Indicates whether a key has been found in the ignition switch or not. |
| DynamIgnitSwitchON | Indicates whether a dynamic ignition switch is ON of OFF. |
| DriverFDoorOpened | Indicates whether front driver door is opened or not. |
| PassFDoorOpened | Indicates whether front passenger door is opened or not. |
| ParkingBrakeApplied | Parking brake position. |
| PedalBrakePressed | Brake pedal status. |
| EngineWorking | Engine status. |
| EngineTimeON | Time engine is ON |
| VehicleMileage | Odometer value, km |
| TotalFuelConsum | Fuel consumed, liters |
| FuelLevel | Fuel level, % or liter |
| EngineSpeed | Engine speed, rpm |
| EngineTemp | Engine temperature, degrees of Celsius |
| VehicleSpeed | Vehicle speed, km/h |
| AccelerationPosition | Acceleration pedal position, % |
| EngineTorque | Engine torque, % |
| ParkingLights | Parking lights status |
| DippedHeadlights | Indicates dipped headlights status, |
| FullBeamHeadlights | Full beam headlights status, |
| DriverSeatbelt | Driver seatbelt status |
| PassSeatbelt | Front passenger seatbelt status |
| STOP | Stop indicator. |
| OilPressureLevel | Oil Pressure Level indicator. |
| CoolantTempLevel | Coolant level low/Coolant temperature high indicator. |
| HandBrakeSystem | Hand brake indicator. |
| CheckEngine | Engine malfunction (On-board Diagnostics) |
| LightsFailure | Bulb failure indicator. |
| LowTirePressure | Tire pressure low or system failure indicator. |
| WearBrakePads | Brake pad wear indicator |
| Warning | Warning indicator. |
| ABS | Antilock Braking System (ABS) malfunction |
| LowFuel | Low fuel level indicator. |
| ESP | Electronic stability control indicator. |
| AxlesLoad | Axles load, kg |
Although GSE’s solution provides most common parameters that are available directly from the CANbus, some customers are looking for specific data that is not available with the core setup. Our engineers have been able to fulfill specific requirements that our customers had in the past to provide the complete solution across their fleet. Most controllers that are available today support only one-directional intermittent communication – retrieving data from the bus. GSE’s solution supports bidirectional communication, namely, not only reading but also writing data to the bus to perform extended functionality (e.g. immobilizing, central lock system remote control, etc.)
Feature Highlights of GSE’s Universal CANbus Solution
- Single hardware profile across the fleet of vehicles and special machinery
- Does not require to know the specific PGNs, SPNs or PIDs
- Universal Controller allows not only reading data from CANbus, but also supports writing data to the bus, which offers an extended set of features such as immobilizing, remote central click control, and others
- Contactless adapter allows the installation of the Universal Controller without breaking wire insulation, which may void the manufacturer's warranty
- Contactless adapter does not require prior identification of the CAN-High and CAN-Low lines
- Low power friendly
Additional Services and Features
Along with CANbus and other telematics over-the-air data delivery, Global Satellite Engineering, Inc. (GSE) offers other important service and features such as in-cab messaging and emails, dispatching, electronic driver logging, electronic forms, etc.
GSE has developed a fully customizable “In-cab FMI (Fleet Management Interface) Solution” which can also be deployed with existing fleet management applications. It offers our customers navigation, tracking, communication with a driver via Instant Messaging, emails, dispatch and e-forms capabilities using off-the-shelf PDA products such as Android or Apple phones and Tablets as well as Garmin FMI devices. Our solution allows development of customized applications for Android and iOS, implementing extended functionality on top of the core features and services.
Since our solution consists of several components, our customers can either select to deploy the whole solution or select only certain components (e.g. integrate existing GSatMicro/IDP installations with the Universal CANbus Controller or switch to an advanced universal tracking platform such as GSE’s own GSatTrack platform for an ultimate set of tracking features and functionalities...more details on GSatTrack are covered below).
FMI solutions that most companies offer today are based on the Garmin FMI technology, which require cabled connection between the tracking equipment and the Garmin Personal Navigation Devices. The GSE’s “In-cab FMI Solution” allows to use the Garmin-based technology as mentioned above, as well as use of other off-the-shelf PDA products that run either on iOS, Android or Windows OS and support wireless communications. Therefore, no wired connection is required between the PDA and the satellite tracking device for communication.
Figure 4. Full Fleet Management Solution
Features of GSE In-cab FMI Solution
Instant Messaging and emails:
any text can be sent and received using this solution also allowing to send and receive emails using off-the-shelf personal handheld devices
Dispatching:
allows to send to a list of stops for the route to a driver - waypoints Upon arrival, a message will be generated by the navigation device and sent over-the-air to GSatTrack reflecting the progress of the route execution
HOS and CANbus data:
hours-of-service, axles weight, fuel data as well as other CANbus parameters can be shown on the PDA display in real-time
DriverID:
driver authentication and history information for every vehicle in the fleet
Electronic forms:
fill-out forms and submit information OTA anywhere, anytime
Managing the data with GSatTrack
GSatTrack, our feature-rich Universal Tracking Platform is a major component of the Fatigue Management Solution. It provides full control over the Universal CANbus controller, data delivery, alerts and warnings generation. GSatTrack allows users to view CANbus parameters when certain events such as fuel theft, unauthorized access to a vehicle and other are detected. It also permits users to request current CANbus parameters and many more.
GSatTrack is a web based integrated satellite and GSM tracking solution, compatible with modern web browsers and works on a multilingual platform that brings together all the positions of every manufactured product under one location and displays and manages them in a single unified interface. With GSatTrack, fatigue events, asset locations and movements including position, speed, altitude, heading and timestamps of events are tracked in real-time worldwide via GPS updates. Our technology allows you to merge together various types of tracking equipment, including Dual-Mode Satellite-Cellular terminals into one multifunctional easy to use platform. The tracking equipment determines its location by triangulating a position using GPS (Global Positioning System) as well as captures various vital events and then transmits this information via GSM or Satellite to a central server for processing. Any operator can view and control any number of real-time assets simultaneously.
About the Author

Yanosh Sabo has worked specifically with Satellite M2M communications since 2012, starting with a Masters in Computer Science. He specializes in deeply integrated solutions, utilizing the latest technology, and building platforms to enable the next generation of M2M solutions.
More Information
For general inquiries, please contact sales@gsat.us. For more technical information, please contact support@gsat.us. You may also call us at +1.954.459.4000
![]()